从L2到L4的技术跃迁:自动驾驶分级的工程逻辑与产业博弈
2016年,美国汽车工程学会提出了SAEJ3016分级标准,将自动驾驶划分为L0至L5六个等级。十年后的今天,L3的存废之争,本质上是一场关于工程落地路径与商业利益分配的战略博弈。
分级标准的诞生与L3的结构性困境
L3被定义为有条件自动驾驶。在限定场景下,车辆可实现完全自主驾驶,但当系统检测到无法处理的场景时,必须在有限时间内将控制权交还人类驾驶员。这一设计初衷看似稳妥,却在工程实践中暴露出致命缺陷:人类驾驶员在高度依赖自动驾驶后,其反应速度和注意力状态往往无法满足10秒接管窗口的要求。同济大学教授朱西产用“猴子搬来的救兵”来形容这一困境——机器无法处理时召来人类,而人类的状态已不适合接管。这种人机混驾的边界条件,恰恰是L3最大的工程悖论。
华为的三点论据:安全、数据与监管
华为高级副总裁靳玉志提出的三个论点具有严密的工程逻辑。安全层面,L4要求系统达到十倍于人驾的安全性,这需要海量真实道路数据的积累与验证。用户层面,辅助驾驶L2的用户教育尚在进行中,完全脱手的L4需要更长的市场培育周期。监管层面,法规和保险体系需要基于L3阶段的实际运营数据逐步完善。这三重约束共同构成了L3存在的合理性——它不是技术上的最优解,而是当前产业成熟度下的折中方案。
小鹏的跨越逻辑:AI技术奇点临近
何小鹏的判断基于2025年下半年以来AI物理世界模型的突破。大模型赋予系统真正的泛化能力,使得L2到L4在技术架构上实现同源成为可能。卓驭科技CEO沈劭劼指出,一个真正能做到10秒无需接管的系统,实际上已接近L4水平——这意味着L3和L4之间的技术鸿沟正在被新范式弥合。周光认为,大模型的认知能力提升将极大加速从L2到Robotaxi的进程。在这一判断下,L3不再是必经阶段,而是可以跨越的中间环节。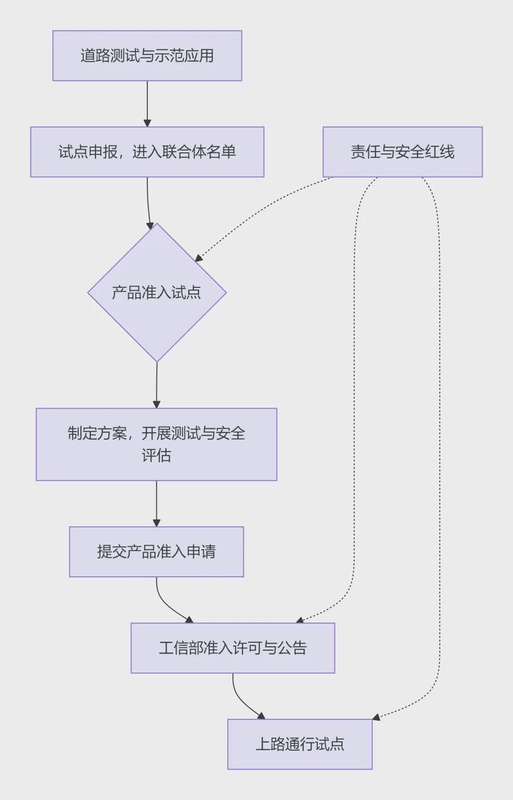
技术架构范式转移:从规则驱动到数据驱动
新旧两代技术架构的分野在于底层范式。传统L3方案依赖规则堆砌与场景枚举,面对CornerCase时脆弱不堪。新一代方案基于端到端神经网络与世界模型,系统通过海量数据学习涌现出泛化能力。华为、小鹏、理想、Momenta正在重塑技术栈,元戎启行、地平线、文远知行等新玩家也凭借新架构展现出强劲竞争力。这种范式转移使得“跳过L3”在技术上变得可行。
政策博弈与产业格局重塑
L3已获得实质性的政策推进。工信部于2025年12月附条件许可了两款L3车型公告,长安深蓝SL03L3版、极狐阿尔法S6L3版已获准在限定路段试点运行。华为作为这些车型背后的智驾供应商,必须捍卫L3路线的正当性。相比之下,小鹏选择直接布局L4Robotaxi,2026年规划常态化公开道路测试,2027年目标取消安全员实现完全无人驾驶。这两条路径的竞争,将决定未来五年智能驾驶产业的基本格局。
工程落地的现实路径选择
对于行业从业者而言,L3与L4的选择并非非此即彼。从工程验证角度,L3提供了相对可控的边界条件,便于积累数据和优化系统;从商业落地角度,L4代表了更高的技术壁垒和更大的想象空间。关键在于,企业需要根据自身的技术储备、客户群体和战略定位,在这两条路径之间找到最优解。对于尚无L2+能力的企业,连参与这场讨论的资格都没有——这才是当前竞争格局中最残酷的现实。

